Simple Low Pass
The first example is a first order low pass filter. First order means
that the filter has a single pole which is on the real axis at ![]() .
The filter also has one zero at
.
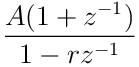
The filter also has one zero at ![]() . The system function is
. The system function is
 |
(19) |
where ![]() is a normalization factor chosen so that
is a normalization factor chosen so that ![]() . A
simple calculation shows that
. A
simple calculation shows that ![]() . The pole-zero plot is
shown in figure 2
. The pole-zero plot is
shown in figure 2

The value of ![]() will be large in the vicinity of the pole at
will be large in the vicinity of the pole at ![]() and it will be small in the vicinity of the zero at
and it will be small in the vicinity of the zero at ![]() . The
frequency response is the magnitude of
. The
frequency response is the magnitude of ![]() along the unit circle.
The point on the unit circle closest to the pole is
along the unit circle.
The point on the unit circle closest to the pole is ![]() which
corresponds to zero frequency or DC. This is where the frequency
response will be a maximum, which is what you would expect from a low
pass filter. The frequency response will have a minimum of zero where
which
corresponds to zero frequency or DC. This is where the frequency
response will be a maximum, which is what you would expect from a low
pass filter. The frequency response will have a minimum of zero where
![]() which corresponds to the maximum frequency of half the sampling
rate.
which corresponds to the maximum frequency of half the sampling
rate.
This is a simple example of how you can use the location of the poles
and zeros, with respect to the unit circle, to get a qualitative idea
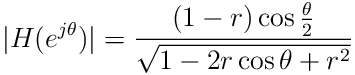
of what the frequency response looks like. Now we’ll look at what a
plot of the frequency response magnitude actually looks like. You get
a formula for the magnitude by substituting ![]() into
eq. 19 and taking the magnitude. After a little
algebra and some simplification, the formula is:
into
eq. 19 and taking the magnitude. After a little
algebra and some simplification, the formula is:
 |
(20) |
A plot of this for various values of ![]() is shown in figure 3.
is shown in figure 3.

When ![]() is close to
is close to ![]() , the pole is close to the unit circle and the
response falls off rapidly as you move away from
, the pole is close to the unit circle and the
response falls off rapidly as you move away from ![]() , i.e. as
, i.e. as
![]() increases. For smaller values of
increases. For smaller values of ![]() , the response falls off
less rapidly.
, the response falls off
less rapidly.
To completely characterize this filter we also need to look at the
phase of the frequency response. When you substitute ![]() into eq. 19 you can write the frequency response as
into eq. 19 you can write the frequency response as
| (21) |
We just looked at the equation for the magnitude ![]() .
Now we want an equation for the phase
.
Now we want an equation for the phase ![]() . Using the standard
procedure for converting a complex expression into polar form, gives
the following formula:
. Using the standard
procedure for converting a complex expression into polar form, gives
the following formula:
 |
(22) |
A plot of the phase for various values of ![]() is shown in figure 4.
is shown in figure 4.

For values of ![]() in the pass band of the filter (near
in the pass band of the filter (near ![]() ) the
phase is almost a linear function of the frequency. This is good
because a response with nonlinear phase can cause phase distortion in
the signal you are filtering. It’s something to keep in mind but it is
often not a problem so we are not going to spend a lot of time on the
subject in this introductory treatment of filters.
) the
phase is almost a linear function of the frequency. This is good
because a response with nonlinear phase can cause phase distortion in
the signal you are filtering. It’s something to keep in mind but it is
often not a problem so we are not going to spend a lot of time on the
subject in this introductory treatment of filters.
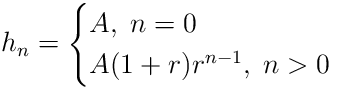
Now let’s look at the impulse response of the filter. To get the
impulse response you simply expand ![]() as a Taylor series in the
variable
as a Taylor series in the
variable ![]() . You can do this with symbolic math software such
as Mathematica or Maxima. This gives
. You can do this with symbolic math software such
as Mathematica or Maxima. This gives
|
|
|
(23) | ||
|
|
|
where ![]() is the normalization constant. The
is the normalization constant. The ![]() term in
the impulse response is equal to the coefficient of
term in
the impulse response is equal to the coefficient of ![]() so we
have
so we
have
 |
(24) |
You can see from this equation that the impulse response only decays
if ![]() . Only when the pole is inside the unit circle will the
filter be stable. It is generally true that the poles of a filter
must be inside the unit circle for the filter to be stable.
. Only when the pole is inside the unit circle will the
filter be stable. It is generally true that the poles of a filter
must be inside the unit circle for the filter to be stable.
The filter is implemented by deriving the recursive filter equation
from the system function in equation 19. Using
![]() in equation 19 and rearranging the
terms gives
in equation 19 and rearranging the
terms gives
| (25) |
which is easily recognized to be the z-transform of the equation
| (26) |
So the recursive equation for implementing the filter is
| (27) |
with zero initial conditions, ![]() and
and ![]() for
for ![]() .
.
The last question about this filter that we still have to answer is
how to choose the value of ![]() .
. ![]() will have a large value in the
vicinity of the pole at
will have a large value in the
vicinity of the pole at ![]() which you can see from the pole-zero
plot. When
which you can see from the pole-zero
plot. When ![]() is close to the unit circle, the magnitude of
is close to the unit circle, the magnitude of ![]() will drop off very rapidly as you move away from
will drop off very rapidly as you move away from ![]() along the unit
circle. If for some value of
along the unit
circle. If for some value of ![]() we want the magnitude to be
reduced to
we want the magnitude to be
reduced to ![]() then substitute
then substitute ![]() into
equation 20 and solve for
into
equation 20 and solve for ![]() . This gives
. This gives
 |
(28) |
Often times you will have a value of ![]() , called the half power
point, where you want
, called the half power
point, where you want ![]() . In this case equation
28 reduces to
. In this case equation
28 reduces to
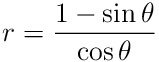 |
(29) |
We will show how to use this formula in the following design problem.
- Design Problem:
-
You have a signal that is sampled at
 samples/sec and you want
samples/sec and you want  Hz to be the half power point,
i.e. you want all frequencies above Hz to be attenuated by
at least a factor of
Hz to be the half power point,
i.e. you want all frequencies above Hz to be attenuated by
at least a factor of  . What value of
. What value of  should you use to accomplish this?
should you use to accomplish this? - Answer.
-
The sampling frequency is
 Hz and the half
power frequency is
Hz and the half
power frequency is  Hz so the dimensionless frequency is
Hz so the dimensionless frequency is
 . Using this in equation
29 for gives:
. Using this in equation
29 for gives:
Return to Table of Contents